
Proches de l’univers de la science-fiction, des chercheurs japonais poursuivent leur quête pour mêler le monde du vivant à celui des machines. Une équipe de l’université de Tokyo, spécialisée dans les réalisations biohybrides, a conçu un minirobot bipède de quelques millimètres dont le squelette artificiel et les muscles biologiques lui permettent d’avancer et de pivoter dans l’eau sur un très faible rayon. Ces résultats ont été publiés dans la revue Matters du 26 janvier.
Cette recherche est dans la lignée de précédents travaux du département des systèmes mécaniques et biofonctionnels de l’Institut des sciences industrielles de Tokyo, telle la réalisation « de robots dotés d’une peau vivante, de récepteurs olfactifs ou de muscles issus de l’ingénierie tissulaire », énumère le chercheur Shoji Takeuchi, porte-parole de l’équipe. « Nous nous sommes concentrés cette fois-ci sur un robot bipède alimenté par du tissu musculaire en espérant obtenir des mouvements efficaces et silencieux, un pivotement délicat et une démarche plus proche de celle de l’homme », poursuit ce spécialiste qui reconnaît « avoir été surpris de parvenir à une marche bipède vers l’avant et l’arrière ».
Entre le concept initial et la publication, la recherche a duré près de quatre ans, temps nécessaire, explique le scientifique, pour concevoir et fabriquer le robot, cultiver et intégrer les tissus musculaires puis affiner les capacités de marche.
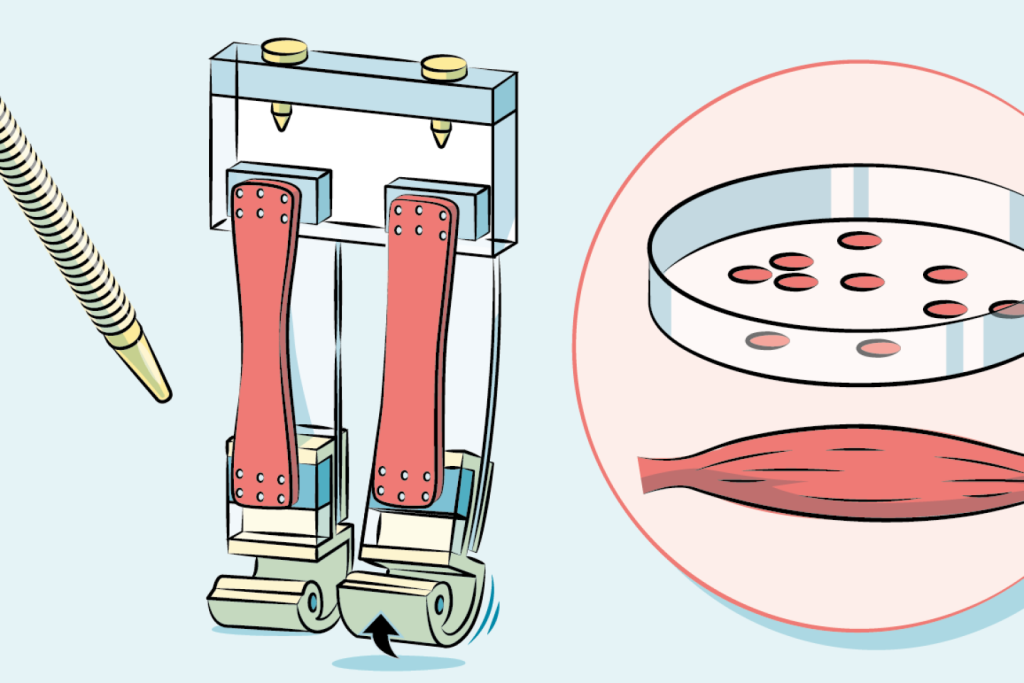
Pour se mouvoir, les jambes, constituées d’un substrat flexible − majoritairement du silicone − et de muscles biologiques − obtenus par culture de cellules de rat −, reçoivent une stimulation électrique. Ce sont des électrodes latérales, tenues manuellement, qui permettent la contraction musculaire d’une jambe, puis de l’autre, et ainsi de suite. « L’une des principales difficultés a été de parvenir à un équilibre entre la force contractile du muscle, la force de réaction du substrat [squelette] et la flottabilité nécessaire au mouvement bipède », précise le chercheur. Pour rester dans l’eau, nécessaire à l’hydratation, donc à l’efficacité des muscles, les jambes possèdent un flotteur et sont lestées par des poids, intégrés dans leurs extrémités réalisées en imprimante 3D.
« Suppléer des fonctions musculaires humaines déficientes »
Même si cette preuve de concept est encore très lente (le robot a parcouru 5,4 millimètres en une minute) et assez rudimentaire, l’équipe japonaise affiche des objectifs ambitieux : réaliser à moyen terme des muscles biologiques qui se déshydratent moins dans l’air et « développer des robots dotés d’articulations permettant des mouvements plus sophistiqués ».
Il vous reste 39.31% de cet article à lire. La suite est réservée aux abonnés.

















{kind=link}