
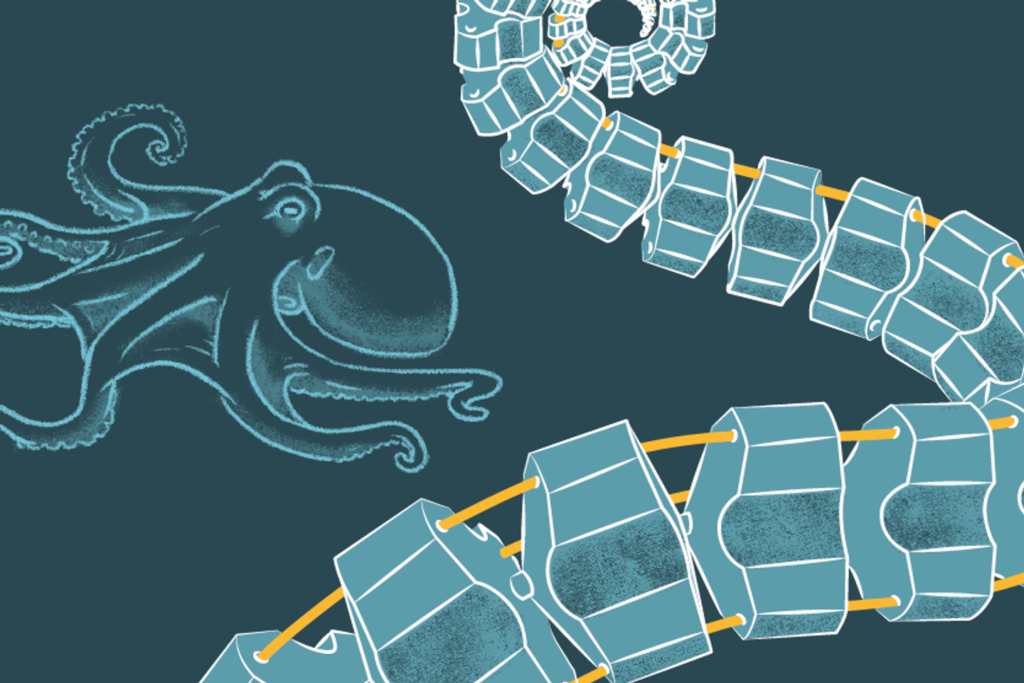
Qu’ont en commun la trompe de l’éléphant, la queue du caméléon ou de l’hippocampe et le tentacule de la pieuvre ? Un enroulement suivant la forme d’une spirale logarithmique. Cette géométrie particulière a inspiré une équipe de l’université des sciences et technologies de Chine à Hefei, qui propose dans la revue Device du 6 décembre 2024 une nouvelle classe de bras robotisés qu’elle a baptisée Spirobs. L’idée centrale est d’offrir une alternative aux robots souples dont la dextérité et la force sont souvent antinomiques : des matériaux flexibles ne permettent pas toujours de manipuler de lourdes charges.




Les Spirobs sont conçus pour combiner une force de préhension élevée et une capacité de repliement autour des objets à des fins de préhension, comme le fait la pieuvre. La commande est assurée par de simples câbles dont l’allongement est coordonné. La taille des objets saisis peut varier d’un facteur de plus de 1 à 100, et le bras peut supporter jusqu’à 260 fois son poids. Une version de taille millimétrique permet de saisir une fourmi, tandis qu’un bras fixé sur un drone est capable de manipuler une lourde charge. Il est possible de combiner ces tentacules artificiels pour une meilleure préhension, de s’insinuer entre des obstacles pour atteindre des endroits inaccessibles, ou de lancer des objets.
L’équipe de Xi Wei n’a pas encore développé les modèles de commande et les systèmes de détection des obstacles qui permettraient de développement ses capacités de préhension fine. « C’est la priorité de nos prochains travaux », écrivent-ils en conclusion de leur étude. Pour les amateurs qui souhaiteraient les imiter, ils donnent la recette pour fabriquer des Spirobs avec des imprimantes 3D, ou même, dans une version « origami » en deux dimensions, avec de simples feuilles de papier découpées. Une occasion ludique de tirer les ficelles !















{kind=link}